7749: 学习系列 —— 图论 —— 最近公共祖先 —— Tarjan算法
[Creator : ]
Description
【Tarjan 求 LCA】
Tarjan 发明了很多算法。和倍增求 LCA 相比 Tarjan 算法是离线算法。离线算法,顾名思义,就是在一次遍历中把所有询问一次性解决,所以其时间复杂度是 $O(n+q)$。
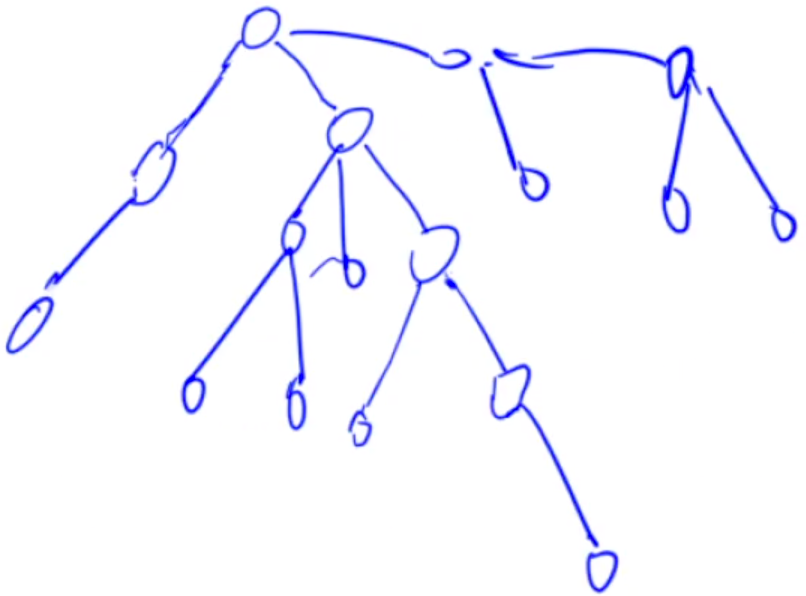
如下图所示的树。
我们将当前搜索状态分为 $3$ 类。
$0$ 还没有搜索的分支;
$1$ 正在搜索的分支;
$2$ 已经遍历过,且回溯过。
如下图所示,绿色为 $2$,红色为 $1$,蓝色为 $0$。
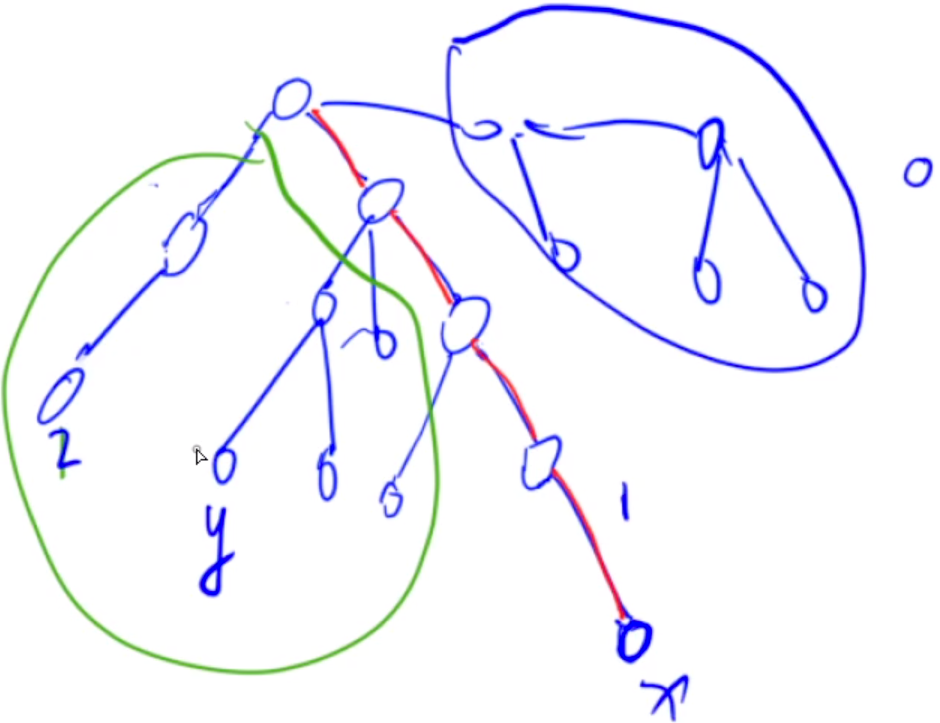
如上图所示,我们想知道正在搜索的节点红色 $x$ 和已经搜索过的节点绿色 $y$ 的最近公共祖先。我们只需要查询 $y$ 在并查集中的位置即可。
Tarjan算法的优点在于相对稳定,时间复杂度也比较居中,也很容易理解。
下面详细介绍一下Tarjan算法的基本思路:
1. 任选一个点为根节点,从根节点开始。
2. 遍历该点 $u$ 所有子节点 $v$,并标记这些子节点 $v$ 已被访问过。
3. 若是 $v$ 还有子节点,返回 2,否则下一步。
4. 合并 $v$ 到 $u$ 上。
5. 寻找与当前点 $u$ 有询问关系的点 $v$。
6. 若是 $v$ 已经被访问过了,则可以确认 $u$ 和 $v$ 的最近公共祖先为 $v$ 被合并到的父亲节点 $a$。
【时间复杂度】
$O(n+q)$,其中 $n$ 为顶点数,$q$ 是查询数量。Input
【伪代码】
Tarjan(u)//marge和find为并查集合并函数和查找函数
{
for each(u,v) //访问所有u子节点v
{
Tarjan(v); //继续往下遍历
marge(u,v); //合并v到u上
标记v被访问过;
}
for each(u,e) //访问所有和u有询问关系的e
{
如果e被访问过;
u,e的最近公共祖先为find(e);
}
}
Output
【数据结构】
【初始化】
【预处理】
根据题目不同,进行预处理,比如下面的预处理,计算节点到跟节点距离
【tarjan算法】
//存储树 const int N=5e5+10; LL h[N]; const int M=2*N; LL e[M], w[M], ne[M], idx; //并查集 LL fa[N];//编号为 i 的节点父亲是谁 //状态 LL st[N];//编号为 i 的节点状态 //st=0. 当前节点没有遍历过 //st=1. 当前节点正在遍历,没有被回溯 //st=2 当前节点被遍历过,且被回溯过 LL res[N];//编号为 i 的节点答案 LL dis[N];//编号为 i 的节点到跟节点的距离 const int Q=1e6+10; vector<PLL> query[Q];//存储所有的查询 LL n;//顶点的数量
【初始化】
for (LL i=0; i<=n; i++) {
st[i]=0;//初始化状态
fa[i]=i;//初始化并查集
h[i]=-1;//初始化头节点
dis[i]=0;//初始化距离
res[i]=0;
}
idx=0;
query.clear();
【预处理】
根据题目不同,进行预处理,比如下面的预处理,计算节点到跟节点距离
void dfs(LL u, LL fath)//求结点u到根节点的距离
{
for (LL i=h; ~i; i=ne[i]) {
LL v=e[i];
if (v==fath) {
continue;
}
dist[v]=dist+w[i];
dfs(v, u);
}
}
【tarjan算法】
void tarjan(LL u) {
st=1;//表示当前点被遍历到
for (LL i=h; ~i; i=ne[i]) {
LL v=e[i];
if (!st[v]) {
tarjan(v);
p[v]=u;//结点v的父节点为u
}
}
for(auto item:query) {
LL v=item.first, id=item.second;
if (st[v]==2) {
LL anc=find(v);//查找v的父亲
res[id]=dist+dist[v]-2*dist[anc];
}
}
st=2;//标志节点u为回溯完成
}